The presentation surveys two seminal methods which were proposed for fluid physics-based animation for walking in bipeds and quadrupleds. The methods described are SIMBICON and GENBICON.
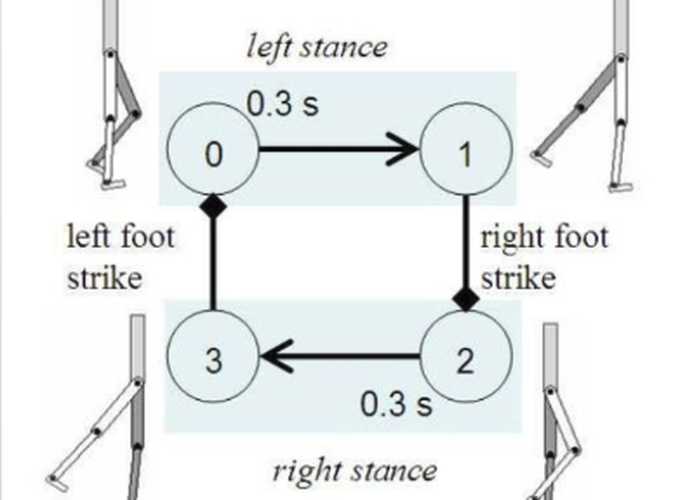 SIMBICON Biped
SIMBICON Biped